Agilex
Research
Wheeled
pilot-os ready
Scout 2.0
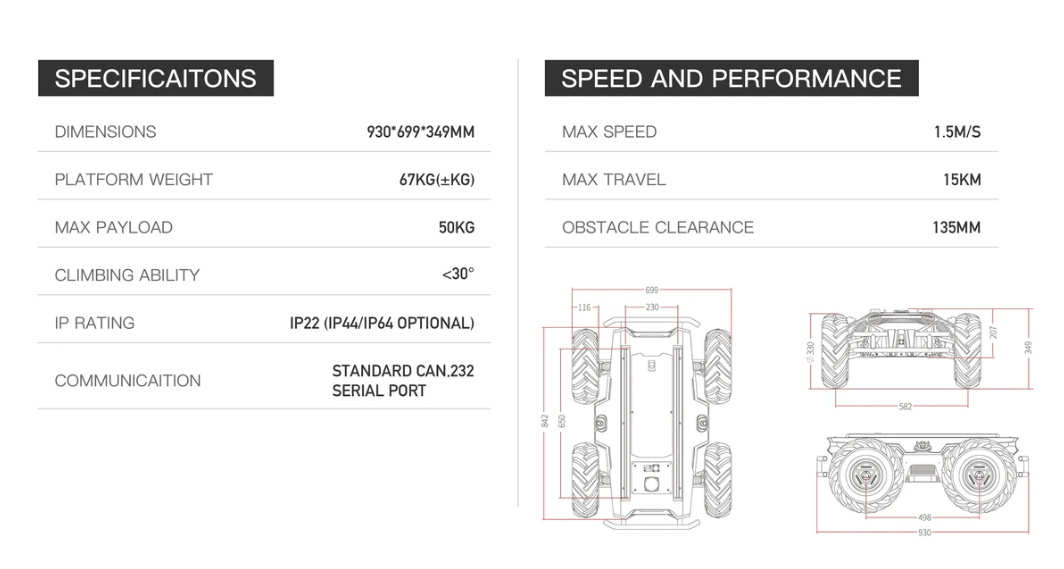
SCOUT 2.0 is a robust and versatile four-wheeled unmanned ground vehicle (UGV) engineered for a wide range of industrial and research applications.
Platform Weight
67kg
payload capacity
50kg
Climbing Ability
Up to 30°
Maximum Speed
1.5m/s
Runtime
Up to 8 hrs



Platform Features

Intelligent Autonomy
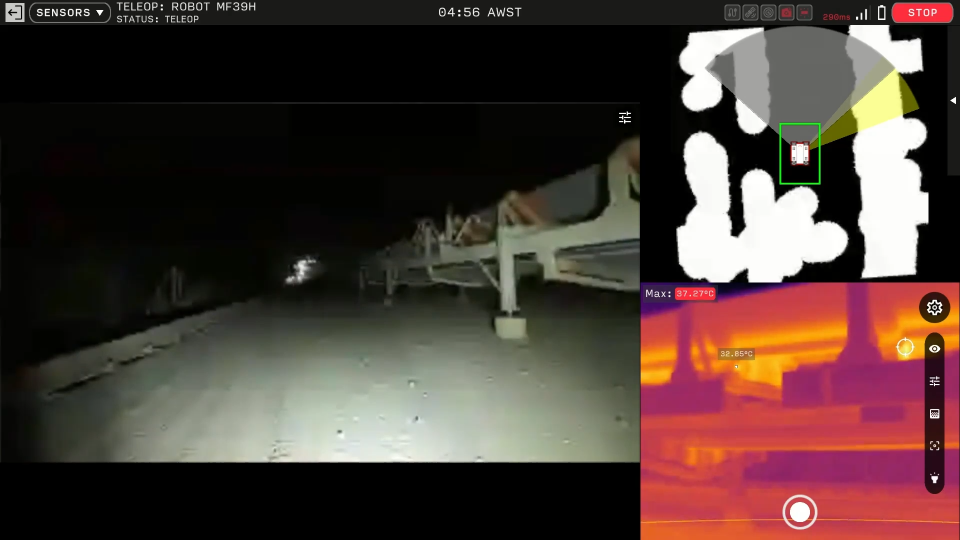
Defence-grade navigation powered by PilotOS enables confident operation in any environment, including GPS-denied spaces.
Industrial Resilience
From mine sites to construction zones, our integrated system ensures stable operations and precise handling across challenging terrain.
Mission Adaptability
Modular architecture with multi-sensor fusion capabilities, all controlled through a single intelligent interface.
Applications
Autonomous Inspection
Transform your asset monitoring with intelligence-driven automation. Bunker Pro combines advanced mobility with sophisticated sensor fusion.
Read more
Materials Transport
Streamline your logistics operations with autonomous payload delivery.
Read more
Industrial Monitoring
Enhance your inspection capabilities with comprehensive data collection, enabling automated conveyor belt monitoring, infrastructure integrity assessment and more.

Defense Applications
Mission-critical capabilities derived from our defence heritage including operations in GPS-denied environments, secure communications protocols, multi-robot coordination and more.
Read more
Autonomous Inspection
Transform your asset monitoring with intelligence-driven automation. Bunker Pro combines advanced mobility with sophisticated sensor fusion.
Read more
Materials Transport
Streamline your logistics operations with autonomous payload delivery.
Read more
Industrial Monitoring
Enhance your inspection capabilities with comprehensive data collection, enabling automated conveyor belt monitoring, infrastructure integrity assessment and more.
Defense Applications
Mission-critical capabilities derived from our defence heritage including operations in GPS-denied environments, secure communications protocols, multi-robot coordination and more.
Read more
Our Software Solution
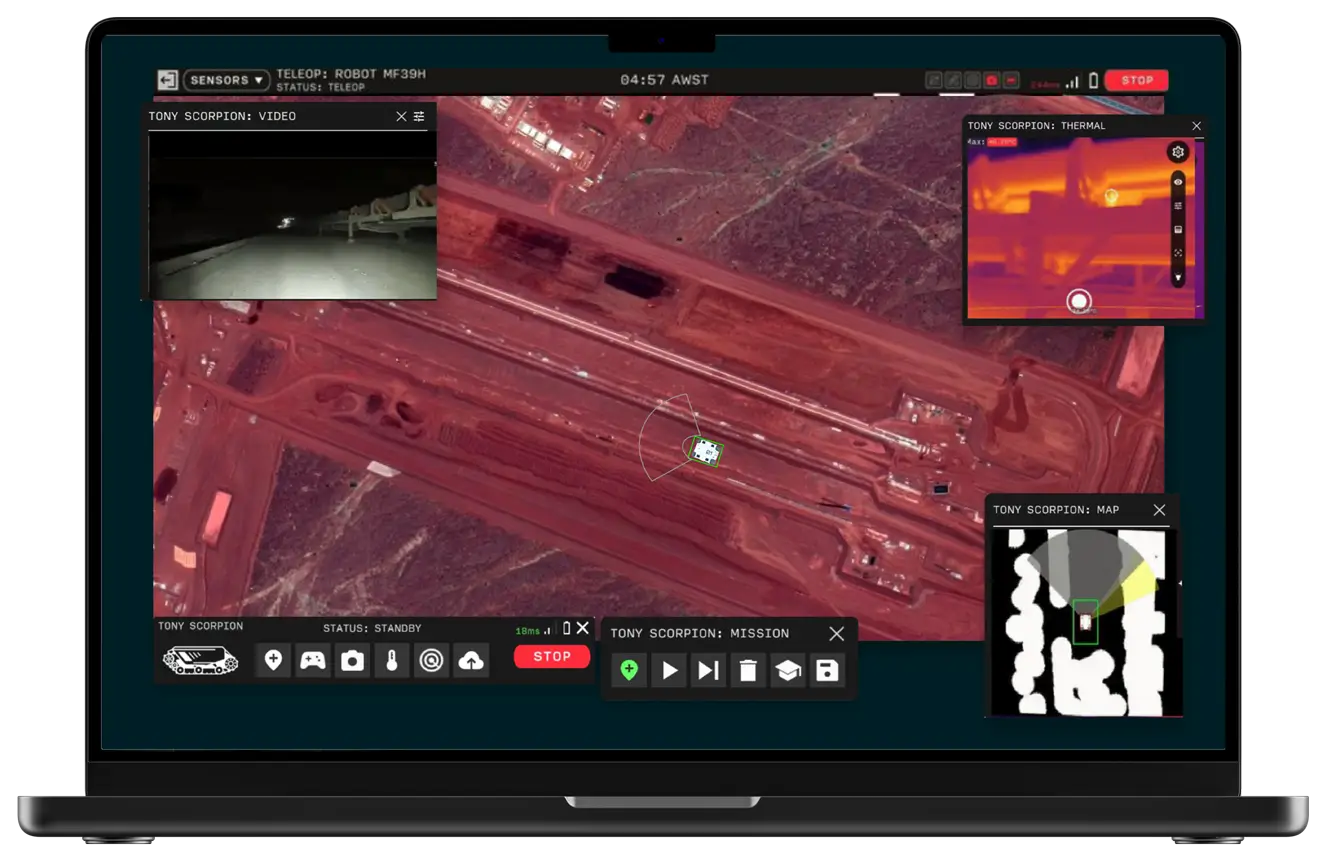
Integrate Effortlessly With Pilot-OS
PilotOS is the powerful, intuitive software platform that drives the world’s most advanced robotic systems, enabling robots to work effectively alongside your team.
Compatible with all ROS-operated platforms, PilotOS is the only robotics software that offers total flexibility – allowing you to choose the perfect robot for any task.
Frequently Asked Questions
[01]
We’re not just another robotics company – we’re a software intelligence provider that transforms capable hardware into intelligent teammates. Our platform-agnostic approach means you can control multiple robot types through a single interface, while our defence-grade autonomy ensures reliable performance in challenging environments.
[02]
Our typical deployment timeline is 3-5 weeks, including system integration and operator training. Our platform-agnostic approach and standardised deployment process ensure consistent results across different environments and use cases.
[03]
We offer comprehensive support including, initial site assessment and solution design, operator and maintenance training, 24/7 technical support, regular software updates and ongoing optimisation services.
[04]
Yes, PilotOS is designed for seamless integration with existing systems. We support standard industrial protocols, custom API development, legacy system integration and secure data handling.
[05]
While our technology began in defence, we now serve multiple sectors including mining and resources, oil and gas, construction, critical infrastructure, defense and security. Each solution is tailored to industry-specific requirements while maintaining our core focus on reliable autonomy and human-robot collaboration.
Explore Pilot-OS Ready Platforms


{kind=link}
Speak to a member of our team
Head Office
Unit 3 / 33 Millrose Dr Malaga Western Australia 6090
US Office
Suite 200 1703 Pennsylvania Ave Washington DC 20006 USA